
基于系统工程视角的薯类农业机械设计方法研究
分类:农业论文
时间:2022-05-05
摘 要:针对目前薯类农业机械设计方法存在的问题,基于系统工程视角分析薯类农业机械系统设计环境, 并以单行甘薯秧蔓回收机设计过程为例, 构建薯类农业机械系统设计方法和步骤,以期构建薯类农业机械研究设计的新视角,并为农业机械研究设计提供参考。
关键词:系统工程;农业机械;设计方法;薯类机械
近年来, 我国通过不断引进国外先进的农机装备机型和生产先进技术的方法来提高农机装备技术[1],这在一定程度上可以缩小我国农机与国外的水平差距。但国外的农业种植情况与国内并不完全相同, 要实现国外先进技术的本土化还需要对农机进行适合我国农业的优化设计[2],一些零部件的尺寸可能需要更改,甚至一些结构需要重新设计, 然而目前国内并没有系统的设计方法体系来指导这一设计过程。 我国在农机的研发技术方面能力较弱, 大多数农机企业的研发费用比例较低, 农机企业的部分研发工作也主要体现在现有成熟农机产品的改进与改型, 现代的农机设计方法和配套的模拟试验方法的应用仍不够成熟, 反而又造成农机企业产品更新慢,不能满足农机市场需求[3]。 目前农业机械设计存在的各种问题大多也与研究技术阶段相关, 利用系统工程思想对农业机械进行的相关研究非常少[4]。 农业机械是一个复杂的系统[5],通过系统工程原理来指导研究农业机械设计方法是一个新的视角。 本文基于系统工程视角对薯类农业机械系统的设计方法开展探索性研究。
1 薯类机械系统设计环境
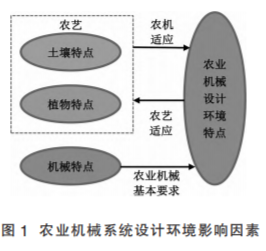
在田间生产过程中, 农业机械要完成各项田间作业任务,长期处于“土壤-机器-植物”的复杂系统之中。 土壤是植物生长的必需要素[6],是农业机械作用的对象之一,不同土壤的成分和结构差异很大,农机工作时部件与不同土壤接触也会产生不同的作业效果,且水分、温度等条件对土壤特征影响明显。 另外,土壤作为农业机械的作业环境因素之一, 作业过程中激起的飞尘对农业机械有一定的影响作用, 而农业机械也对土壤有压实等破坏作用,土壤的黏性、含水率等属性又直接影响了农业机械行走机构等部件的设计。
植物是农作物生产的主要目标, 是决定生产效益的直接因素。 植物作为生命体, 其生长状况不完全一致,难以通过简单的模型来进行描述,给设计带来较大难度。 植物硬度普遍偏小,很容易遭到损伤,在针对植物的作业过程中, 要充分考虑农业机械作业的完成率和对作物的破损率等问题, 同时也要考虑植物对农业机械的磨损、堵塞等作用。 此外,农机与农艺的关系紧密,对农机的设计而言,要考虑与农艺特点相适应,例如种植地区、种植行距、株距、收割高度、收获季节等因素。且农机作业受地区影响严重,地区气候、地形地貌、土壤条件、作物生长状况等各有特点,农机的适应性面临较大挑战。
相关知识推荐:农业机械设计师在哪些期刊发表论文
由于作业对象种类繁多, 农业机械要完成的功能也极其多样。以马铃薯全程机械化为例,主要包括播前处理、土地深耕平整、施肥、马铃薯播种、中耕培土、植保、浇灌、收获等多种通用或专用的土壤耕作机械和农田生产机械。而土壤耕作机械又可以根据翻耕、深松等不同目的选择铧犁或旋耕机。 针对作物作业的农业机械可以分为播种、施肥、植保、收获等机械几大类,马铃薯收获作业对象是地表下植株根部的马铃薯, 而马铃薯杀秧机作业对象是地表上的植株茎叶部分。 而农作物具备多样性,而且 作 物 需 要 进 行的田间管理、收获的 方 式 也 具 有 很大差异,从而造成农 业 机 械 系 统 的设计 环 境 多 种 多样。 农业机械系统设 计 环 境 影 响 因素如图1 所示。
2 薯类农业机械系统设计试验方法
薯类农业机械系统设计过程可以分为 6 个主要步骤,以单行甘薯秧蔓回收机为例。
第一步,针对处于“土壤-机器-植物”环境中的农业机械特点,分析农业机械设计的环境影响因素,从农业机械的需求和农业机械技术发展方向,根据土壤、机器、植物的特点确定设计阶段需求,保障农业机械的环境适应性。 甘薯秧蔓生长旺盛,交错缠绕[7],蔓长 1.5~ 2.5 m,最长可达 4 m 以上,垄沟全部覆盖,且秧蔓具有较高的韧性,工作环境如图 2 所示;单行单垄作业模式可以满足通用动力机械的要求, 单垄单行作业模式如图 3 所示。
第二步,根据农业机械用户需求,结合环境影响因素需求,确定农产品设计需求,分别对农业机械性能要求、完成动作进行动态性分析,分析农业机械系统复杂工况下的动态特性以及系统内外的实时变化。 根据甘薯秧蔓回收需求,首先研究了甘薯秧蔓对农业机械的性能要求, 通过秧蔓拉伸试验研究了秧蔓的力学物理特性,再通过构建甘薯秧蔓各向异性弹性材料模型进行进一步影响因素分析,甘薯秧蔓拉伸试验如图 4 所示。 结合甘薯秧蔓贴伏地表且垄沟皆有秧蔓的特点,设计挑秧装置将秧蔓挑起,挑秧装置结构简图如图 5 所示。
第三步, 农业机械系统通过设计参数来实现机械功能之外,还需要有设计约束来进一步规范设计,以不偏离设计目的性为原则,在能耗、成本、安全、环保、可靠性等约束条件下,设计功能完成设计动作,并确定技术参数。 根据垄顶、沟底等不同工作位置,设计杀秧刀辊,并结合建立的甘薯秧蔓材料模型[8],完成刀辊的力学性能分析,综合确定刀辊的结构设计和工作参数,杀秧刀辊模型如图 6 所示。
第四步, 以系统工程视角对农业机械系统进行描述,然后对设计功能进行细化分解,分别从物料流、能量流、信息流三个部分进一步细化到供料、定位、输送、传动、动力、执行、控制、操纵等不同装置,然后对每一部分进行设计完善,并确定总体方案设计。秧蔓回收机能量流皆来源于发动机,通过皮带传动、链传动、齿轮传动等方式将能量传递到其他装置[9],能量流如图 7。
第五步,利用现有的成熟的设计方法和设计步骤,对总体设计方案进行进一步分析, 通过试制样机和试验对方案进行验证分析,以达到设计的整体性能。对于薯类机械,样机试验可以发现设计中不易发现的问题。
第六步,根据试验结果、样机试制等发现问题,针对问题对产品影响环境因素需求、农机产品设计需求、系统设计及系统细化分解等进行反馈验证, 根据验证结果对总体方案进行优化,达到设计最优。
3 总结
以薯类农业机械为例, 分析了农业机械设计过程中存在的问题,针对薯类农业机械的工作特点,建立了土壤-植物-机械共同影响下的农业机械系统设计环境;以单行甘薯秧蔓回收机设计过程为例,并基于实际研究经验,构建了薯类农业机械系统设计方法和步骤。——论文作者:刘树峰,张广玲 * ,吕钊钦,李光提,李玉道,束 钰
参考文献:
[1] 钱学森,许国志,王寿云.组织管理的技术:系统工程[J].上海理工大学学报,2011,33(6):520-525.
[2] 李文娟. 基于公理化设计理论与可拓学的农业机械概念设计方法研究[D].北京:中国农业大学,2018.
[3] 张福斌.基于系统工程方法论的机械产品可靠性设计[J].中国水运(下半月),2012,12(4):105-106,188.
[4] 谭丕强,王德源,楼狄明,等.农业机械污染排放控制技术的现状与展望[J].农业工程学报,2018,34(7):1-14.
[5] 于景元.从系统思想到系统实践的创新:钱学森系统研究的成就和贡献[J].系统工程理论与实践,2016,36(12):2993- 3002.
[6] 朱立学,罗锡文.基于人-机-环境系统的农业机械化大系统研究[J].农机化研究,2007(9):102-104,108.
[7] 郑文秀,吕钊钦,张万枝,等.单行甘薯秧蔓回收机设计与试验[J].农业工程学报,2019,35(6):1-9.
[8] 穆桂脂,张现广,吕钊钦,等.仿形甘薯杀秧机刀辊的设计与仿真分析[J].中国农机化学报,2018,39(5):21-26,73.
[9] 郑文秀,吕钊钦,鹿瑶,等.甘薯成熟期秧蔓的机械物理特性参数研究[J].农机化研究,2018,40(6):173-177,182.
* 稍后学术顾问联系您




