
仿生机器人研究现状与发展趋势
分类:工程师职称论文
时间:2022-03-21
摘要:仿生机器人是指依据仿生学原理,模仿生物结构、运动特性等设计的性能优越的机电系统,已逐渐在反恐防爆、太空探索、抢险救灾等不适合由人来承担任务的环境中凸显出良好的应用前景。按照工作环境可将仿生机器人分为陆面仿生机器人、空中仿生机器人以及水下仿生机器人三类。指出仿生机器人经历了原始探索、宏观仿形与运动仿生、机电系统与生物性能部分融合三个阶段,并概述三类仿生机器人国内外研究现状。分析发现当前研究还存在着生物运动机理研究不深,结构设计、材料应用、驱动及控制方式大多较为传统、能量利用率低等问题,导致了仿生机器人从宏观到微观与生物都存在较大差异,“形似而神不似”,远未达到实际应用程度。指出仿生机器人正向着刚柔混合结构,仿生结构、材料、驱动一体化,神经元精细控制,高效的能量转换的类生命系统方向发展。
关键词:仿生机器人;刚柔混合结构;结构材料驱动一体化;类生命系统
0 前言*
当今世界上存在的千万种生物,都是经过亿万年的适应、进化、发展而来,这使得生物体的某些部位巧夺天工,生物特性趋于完美,具有了最合理、最优化的结构特点、灵活的运动特性、以及良好的适应性和生存能力。自古以来,丰富多彩的自然界不断激发人类的探索欲望,一直是人类产生各种技术思想和发明创造灵感不可替代、取之不竭的知识宝库和学习源泉。道法自然,向自然界学习,采用仿生学原理,设计、研制新型的机器、设备、材料和完整的仿生系统,是近年来快速发展的研究领域之一[1-2]。
仿生学是研究生物系统的结构、性状、原理、行为以及相互作用,从而为工程技术提供新的设计思想、工作原理和系统构成的技术科学,是一门生命科学、物质科学、数学与力学、信息科学、工程技术以及系统科学等学科的交叉学科[3]。1960 年 9 月,第一次世界仿生学大会在美国俄亥俄州的空军基地召开。此后几十年中,世界各国竞相展开仿生技术研究,仿生学理论和技术迅速发展,新的仿生原理和仿生装备不断涌现[4]。我国在 2003 年召开了两届香山会议,即第 214 届“飞行和游动生物力学和仿生应用”和第 220 届“仿生学的科学意义与前沿”。此后,又分别在 2010 年和 2011 年召开了第 387 届“分子仿生”、第 395 届“高效降解生物质的自然生物系统资源利用与仿生”以及第 411 届“仿生材料与器件:结构、力学与功能”三届香山会议。为促进仿生学科的发展,由吉林大学工程仿生教育部重点实验室联合 15 个国家的仿生学者牵头发起成立了“国际仿生工程学会”,学会秘书处设在中国。这是国际学术界对我国仿生工程研究水平和学术地位的认可。
仿生学研究的内容包括力学仿生、分子仿生、信息与控制仿生、能量仿生等。其中,力学仿生主要研究生物的宏观结构性能,包括生物的静力学特性和动力学特性;分子仿生主要研究生物的微观特性,包括生物体内酶的催化作用、生物膜的选择性等;信息与控制仿生主要研究生物对信息的处理过程,包括生物的感觉器官、神经元与神经网络等;能量仿生主要是对生物体内能量转换过程和新陈代谢进行研究,包括生物肌肉的能量转换、生物器官的发光等。仿生学的研究一般可分为以下三步:① 对生物原型和生物机理进行研究;② 将生物模型用数学的方法进行表示;③ 根据数学模型制造出可在工程技术上进行试验的实物模型[5]。
仿生机器人是仿生学与机器人领域应用需求的结合产物。从机器人的角度来看,仿生机器人则是机器人发展的高级阶段[6]。生物特性为机器人的设计提供了许多有益的参考,使得机器人可以从生物体上学习如自适应性、鲁棒性、运动多样性和灵活性等一系列良好的性能[7]。仿生机器人按照其工作环境可分为陆面仿生机器人、空中仿生机器人和水下仿生机器人三种。此外,还有一些研究机构研究出水陆两栖机器人[8-9]、水空两栖机器人[10]等具有综合用途的仿生机器人。仿生机器人同时具有生物和机器人的特点,已经逐渐在反恐防爆、探索太空、抢险救灾等不适合由人来承担任务的环境中凸显出良好的应用前景[11]。
国家自然科学基金委员会(以下简称“NSFC”) 非常重视对仿生机器人项目的培育、优选和资助工作。目前,该领域的项目申请主要集中在机械工程学 科 (E05 代 码 ) 的 E0501( 机构学与机器人 ) 和 E0507(机械仿生学)2 个方向。据统计,截止目前, NSFC 在 E05 方向共资助面上项目 137 项,资助经费 7 460 万元;资助国家杰出青年科学基金项目 2 项,资助经费 160 万元;资助青年科学基金项目 81 项,资助经费 1 876.4 万元;资助重大项目 1 项,资助经费 1 500 万元;资助重点项目 8 项,资助经费 1 590 万元;资助地区科学基金项目 3 项,资助经费 150 万元。特别是近年来,资助力度有较大增长。
1 仿生机器人研究现状
仿生机器人的出现很好地体现了仿生应用的理念。如图 1 所示,人类最早进行了陆面仿生机器人的探索,如中国三国时期的木牛流马以及 1893 年由 Rygg 设计的机械马[12];其次,进行了空中仿生机器人探索,最早模仿鸟类的飞行进行扑翼飞行器设计,1485 年达芬奇设计的扑翼飞机图纸是世界上第一个按照技术规程进行的设计;最后,是水下仿生机器人的探索。纵观仿生机器人发展历程,到现在为止经历了三个阶段。第一阶段是原始探索时期,该阶段主要是生物原型的原始模仿,如原始的飞行器,模拟鸟类的翅膀扑动,该阶段主要靠人力驱动。至 20 世纪中后期,由于计算机技术的出现以及驱动装置的革新,仿生机器人进入到第二个阶段,宏观仿形与运动仿生阶段。该阶段主要是利用机电系统实现诸如行走、跳跃、飞行等生物功能,并实现了一定程度的人为控制。进入 21 世纪,随着人类对生物系统功能特征、形成机理认识的不断深入,以及计算机技术的发展,仿生机器人进入了第三个阶段,机电系统开始与生物性能进行部分融合,如传统结构与仿生材料的融合以及仿生驱动的运用。当前,随着生物机理认识的深入、智能控制技术的发展,仿生机器人正向第四个阶段发展,即结构与生物特性一体化的类生命系统,强调仿生机器人不仅具有生物的形态特征和运动方式,同时具备生物的自我感知、自我控制等性能特性,更接近生物原型。如随着人类对人脑以及神经系统研究的深入,仿生脑和神经系统控制成为了该领域科学家关注的前沿方向。
我国仿生研究起步较晚,近 30 年来在 NSFC 的大力资助下,经历了跟踪国外研究、模仿国外成果到局部领域齐头并进三个阶段。如北京航空航天大学孙茂教授利用Navier-Stokes方程数值解和涡动力学理论研究了模型昆虫翼作非定常运动时的气动力特性,解释了昆虫产生高升力的机理,为微型仿生扑翼飞行器的设计提供了理论基础,在国际昆虫扑翼飞行机理研究方面占有一席之地[13]。哈尔滨工业大学刘宏教授研制的类人五指灵巧手,能灵活运动并进行物品的抓取,技术指标与国外同类产品相当[14]。
今天,仿生机器人种类繁多,本文主要针对陆面仿生机器人、空中仿生机器人、水下仿生机器人领域中的部分典型研究工作进行介绍与分析。
1.1 陆面仿生机器人
在自然界中,陆面生物的运动方式多种多样,有双足运动方式,如人类;有多足爬行方式,如狗、壁虎等;有无足移动方式,如蛇类;有跳跃方式,如袋鼠、青蛙、蝗虫等。研究人员从这些生物的组织结构、运行方式等方面得到启发,进行了陆面仿生机器人的研究。主要有仿人机器人、仿生多足移动机器人、仿生蛇形机器人和仿生跳跃机器人等。
1.1.1 仿人机器人
仿人机器人是指一定程度具有人的特征,并具有一定程度移动、感知、操作、学习、联想记忆、情感交流等功能的智能机器人,可以适应人类的生活和工作环境。这是一个融合机械电子、计算机科学、人工智能、传感及驱动技术等多门学科的高难度研究方向,是各类新型控制理论和工程技术的研究平台,也是目前仿生机器人技术研究中具有挑战性的难题之一。仿人机器人的研究可以推动仿生学、人工智能学、计算机科学、材料科学等相关学科的发展,因此具有重要的研究价值和意义。
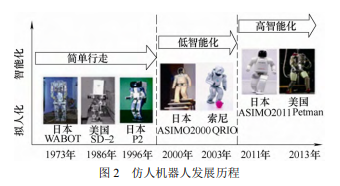
如图 2 所示,仿人机器人经过了几十年的发展,从最初的单元功能实现,仅模仿人进行简单行走,发展到能初步感知外界环境的低智能化,再到现在集成视觉、触觉等多项技术并能根据外界环境变化作出自身调整,完成多项复杂任务的拟人化、高智能化系统。
仿人机器人的研制开始于 20 世纪 60 年代末的双足步行机器人。日本早稻田大学首先展开了该方面的研究工作[15],其研制的 WAP、WL以及 WABOT系列机器人能实现基本行走功能。在此期间,日本、美国、欧盟、韩国等国家的多家机构均进行了仿人形机器人的研究探索工作,并取得了许多突破性的成果,如美籍华人郑元芳博士 1986 年研制出了美国第一台双足步行机器人 SD-1 以及其改进版 SD-2[16]。该阶段主要还是侧重实现机器人的行走功能,并能实现一定程度的控制。进入 21 世纪,随着传感以及智能控制技术的发展,仿人机器人具有一定的感知系统,能获取外界环境的简单信息,可做出简单的判断并相应调整自己的动作,使得运动更加连续流畅。如本田公司于 2000 年研发的仿人形机器人“ASMIO2000”不仅具有人的外观,还可以事先预测下一个动作并提前改变重心,因此转弯时的步行动作连续流畅,行走自如,是第一个具有世界影响力的仿人形机器人[17]。索尼公司 2003 年推出的“QRIO”机器人首次实现了仿人机器人的跑动[18]。其后,法国的“BIP2000”机器人[19]、索尼公司的“SDR”系列机器人[20]、日本 JVC 公司研制的“J4”机器人、韩国的“HUBO”机器人[21],实现了诸如站立、上下楼梯、跑步、做操等复杂动作。
随着控制理论的发展与控制技术的进步,仿人机器人智能性更强,能实现动作更复杂,运行更稳定,且能根据环境的改变和它自身的判断结果自动确定与之相适应的动作。如本田 2011 年发布的 “ASIMO2011”机器人(图 3),综合了视觉和触觉的物体识别技术,可进行细致作业,如拿起瓶子拧开瓶盖,将瓶中液体注入柔软纸杯等,还能依据人类的声音、手势等指令,来从事相应动作,此外,还具备了基本的记忆与辨识能力[22]。2013 年美国波士顿动力公司研制的“ATLAS”机器人(图 4)是当前仿人形机器人的一个代表,除了具有人形外观,还具备了人类简单的识别、判断以及决策功能,是一款具有较高智能化的类人机器人。该机器人能在传送带上大步前进,躲开传送带上突然出现的木板,能从高处跳下稳稳落地,能两腿分开从陷阱两边走过,能单腿站立,被从侧面而来的球重撞而不倒[23]。该公司开发的另一款用于美军检验防护服性能的军用机器人“Petman”(图 5),除了具有较高灵活度外,还能调控自身的体温、湿度和排汗量来模拟人类生理学中的自我保护功能,已经一定程度上具有了人类的生理特性[24]。
仿人机器人另一个研究方向就是仿人手臂和灵巧手指的研究。从最初的外观仿形并实现简单运动阶段发展到现在集运动感知于一体,并能实现类似人手诸如抓取等细微操作的机电系统。美国加利福尼亚大学 TOMOVIC 等[25]于 1962 年针对伤寒病患者设计的“Belgrade”被认为是世界上最早灵巧手,只能实现简单动作。SALISBURY 等[26]于 1982 年设计的“Stanford/JPL”仿人手首次完整引入了位置、触觉、力等传感功能,开创了多指手实际抓取操作的先河,是当时乃至现在都很具有代表性的机械手。此后,机械手朝着更加灵活,更加智能的方向发展。2010 年德国宇航中心 DLR 研制的手-臂联合系统“Hasy”机械手臂(图 6),总共具有 21 个自由度,是第一个采用仿生学关节进行手指设计的多指灵巧手,手指关节的运动模仿人手进行面接触滑动而不是单纯的转动,使其运动特性与人类手指更加接近[27]。国内仿人形机器人研究起步较晚,2000 年国防科学技术大学研制的“先行者”(图 7)是我国第一台仿人形机器人[28]。其后,北京理工大学于 2002 年研制的仿人机器人“BHR”(图 8),突破了系统集成技术,实现了无外接电缆的行走,可在未知地面上稳定行走且能实现太极拳表演等复杂动作[29]。哈尔滨工业大学研制开发的“HIT”系列双足步行机器人实现了静步态和动步态步行,能够完成前/后行、侧行、转弯、上下台阶及上斜坡等动作[30]。清华大学研制开发的仿人机器人“THBIP”(图 9)采用独特传动结构,成功实现无缆连续稳定地平地行走、连续上下台阶行走以及端水、太极拳和点头等动作[31]。北京理工大学 2011 年研制成功的“汇童 5” 仿人机器人(图 10),代表了我国现阶段仿人机器人的最高水平,具有视觉、语音对话、力觉、平衡觉等功能,突破了基于高速视觉的灵巧动作控制、全身协调自主反应等关键技术,成为具有“高超”运动能力的机器人健将[32],此外,浙江大学也进行了仿人机器人的研制,通过轨迹预判的方法提高了机器人对复杂情况的处理能力,实现了机器人打乒乓球的运动[33]。
在仿人手臂与灵巧手指方面的研究,北京航空航天大学的研究开展较早,1993 研制成功了我国第一只三指手“BUAA-I”,其随后改进版本“BUAA-II” 型和“BUAA-III”型三指手相继问世。上海交通大学从 2005 年开始进行基于脑电的机械手臂操作研究,着重研究如何提高假肢手的操作功能和操作灵巧性,开发功能更先进的生物/机械系统接口[34],在此基础上研制了具有“仿人手”功能的新一代假肢手(图 11)。哈尔滨工业大学与德国 DLR 联合研制的类人五指灵巧手“HIT/DLR Hand”(图 12),具有多感知能力,运动灵活,抓取过程仿人化,能够完成正向捏取、三指捏取、柱状抓取等人手大部分抓取功能[14,35]。
相关知识推荐:职称评审发表论文多了好吗
目前仿人机器人研究已在诸如关键机械单元、整体运动、动态视觉等多方面取得了突破,但是与人运动的灵巧性和控制的自主性相比还相差很远。仿人机器人的最终发展目标不仅是外形及运动方式模仿人,而且思维方式和行为方式也接近人,能够通过与环境的交互不断获取新的知识,能自主完成各种任务,还能自己适应结构化或非结构化的动态环境。
1.1.2 仿生多足移动机器人
仿生多足移动机器人的灵感来源于自然界的爬行生物。研究人员从狗、壁虎、螃蟹、蟑螂等爬行生物上获得灵感,进行结构模仿设计。因其具有良好的地形适应能力,近 20 年来一直是一个非常活跃的研究领域,受到世界各研究机构的关注。经过几十年的探索,仿生多足移动机器人的机构与控制均得到较大发展,从单一模仿生物移动发展到具有智能控制和良好的环境感知能力,更接近生物原型的移动机器人。
20 世纪 60 年代中期,通用电器公司研制了四腿式步行机器人“Mosher”(图 13),采用了由人控制的方法模拟四腿生物行走[36],是仿生多足移动机器人技术发展史上的一个里程碑。此后,随着计算机技术的进步,能自主控制移动的机器人相继出现。如日本东京工业大学研制的“TITAN”(图 14)系列四足步行机器人,具有多种运动步态,可在倾斜的楼梯上行走[37]。美国波士顿动力公司 2008 年仿大狗研制的“Big dog”机器人(图 15)是多足运动机器人的代表,具有环境感知和良好的适应能力,平衡性良好,即使侧面被物体冲击,也能很快地通过调整步态恢复平衡状态。可以爬山坡、过雪地、走石子路,上下楼梯,在光滑的冰上行走,甚至能跳跃跨过单杠,可用于军方运输[38]。该公司 2013 年最新研制的“猎豹”机器人(图 16)能够冲刺,急转弯,并能突然急刹停止,与生物原型运动较接近。它的奔跑速度最高可达到 46 km/h,是目前运动速度最快的仿生多足移动机器人[39]。
还有学者基于昆虫的爬行运动机理进行仿生多足机器人的开发。美国凯斯西储大学研制的仿蟋蟀爬行机器人(图 17),是仿生昆虫机器人中的一个代表,可以在一定的范围内行走和跳跃,能够适应粗糙地带,能灵活地进行跑动、转弯、避障等[40]。加拿大麦吉尔大学、密执安大学、加州大学伯克利分校、卡内基梅隆大学等机构在美国国防高级研究计划局(DARPA)的资助下,研制了“RHex”系列腿式机器人(图18为其中一种)[41],拥有六条半弧的“弹力腿”,能够轻松实现快速行驶、跳跃、腾空翻转和攀爬等动作。研究人员还从壁虎能在垂直墙面上行走获得启发研制爬壁机器人。2010 年美国斯坦福大学教授 MARK 研制出“StickyBot Ⅲ”仿壁虎机器人(图 19),脚掌采用干性黏附材料,该机器人从吸附原理、运动形式都比较接近真实的壁虎[42]。
两栖机器人也是仿生多足爬行机器人的一个研究方向,瑞士科学家 2007 年以蝾螈为模仿对象研发出一款机器人“Salamander”(图 20),由 9 节黄色塑料组成,类似蝾螈的脊髓,躯体上被加上四条腿,可以在水中游弋,也能像爬行动物一样行走。此外还模仿动物的脊髓神经元,在机器人上安置了人工神经元,通过改变施加在机器人“脊髓”上的电流剌激实现机器人移动的目的[9]。
在国内,对多足爬行机器人的研究是在 20 世纪 80 年代末 90 年代初起步的,经过了一段时间的发展,我国在这方面的技术也有了长足的进步。上海交通大学研制的关节式四足步行机器人 “JTUWM-III”足底增加了压力传感器,采用基于位置和力的混合控制方法,并将模糊算法和人工神经网络同时应用到分布式控制系统当中,实现了机器人的低速动态行走[43]。哈尔滨工程大学开发的两栖仿生机械蟹每条腿有 3 个自由度,采用双四足步态,能够实现前进、后退、左右转弯和横行等行走方式,具有多功能性和全方位运动能力[44]。南京航空航天大学研制的仿壁虎爬行机器人(图 21),能实现在竖直墙面上的爬行运动[45-46]。在 863 计划项目的资助下,山东大学[47]、国防科学技术大学[48]、上海交通大学[49]、哈尔滨工业大学[50]进行了仿生四足步行机器人的研制,取得一定成果。其中山东大学研制的利用液压驱动四足机器人“SCalf-1”(图 22),具有 8 个俯仰主动自由度和 4 个横摆主动自由度,实现了相对较为稳定的步态行走,最高速度达到 1.8 m/s[51]。此外,燕山大学、北京航空航天大学、中国科学院沈阳自动化研究所等机构也参与了仿生多足机器人的研究工作。
当前,仿生多足移动机器人已经能够在非结构化环境下实现稳定行走,但还远未达到多足生物那样的步行机动性和灵活性,存在步行速度低,效率低等问题。进一步深入研究仿生多足移动机器人的结构、驱动方式以及控制算法,提高机器人的速度和灵活性,同时融合信息感知与智能控制技术,提高机器人的自主性,将是今后的研究重点之一。
1.1.3 仿蛇形机器人
仿蛇形机器人由于其细长的形体结构以及独特的运动方式,能够跨越窄沟和进入空洞,具有很强的环境适应性和地面运动稳定性,能在人类难以到达的未知环境中工作,因此可被广泛应用到科学探险,救灾抢险、生命搜寻等多个领域,受到各国科研人员的青睐。经过几十年的研究,仿蛇形机器人由最初实现仿蛇的基本运动发展到现在不仅能够实现蜿蜒、收缩等多种方式的前进运动,还具有避障、攀爬、翻滚以及水中游动等多种功能,并具备一定环境感知能力。
日本东京工业大学最早开始蛇形机器人的研制,于 1972 年研制了第一台仿蛇形机器人[52],其后研制的“ACM”系列蛇形机器人不仅能完成平面蜿蜒运动,还能够完成侧向滚动、螺旋运动、近 S 曲线等各种空间运动,其最新研制的“ACM-R5” 蛇形机器人(图 23),具有三维运动能力和水陆两栖功能。其每个关节具有俯仰和偏航两个自由度,由人控制遥控操纵杆生成机器人的陆地侧向翻滚、侧向蜿蜒动作以及水下运动[53]。但是,该机器人无法在狭小空间诸如管道内运动,为此,该实验室研制了一种蠕动式行进的蛇形机器人“Slim Slime robot”[54] (图 24),由 6 个可伸缩的模块构成,依靠气动引起模块的伸缩进行行走,行进速度最高 60 mm/s,拓展了蛇形机器人的工作空间。该阶段,蛇形机器人的越障能力一直是困扰研究人员的一大难题。针对该问题,美国密歇根大学 2005 年成功开发了一款采用履带驱动的蛇形机器人“Omni Tread”(图 25),具有很强的运动能力并能够跨越楼梯[55],提高了仿蛇形机器人的越障能力。卡耐基梅隆大学(CMU)研制的一种模块化蛇形机器人(图 26),由 16 个模块组成,能够在空间内实现蜿蜒运动,快速的翻滚,游水以及快速沿着杆以翻滚的姿态进行内攀爬和外攀爬。这在进行攀爬式蛇形机器人方面的研究是一个重大的突破[56]。图 23 “ACM-R5”机器人 图 24“Slim Slime robot”机器人图 25 “Omni Tread” 图 26 卡耐基梅隆仿蛇形机器人
国内仿蛇形机器人研究开始于 20 世纪末。1999 年上海交通大学颜国正教授研制了我国第一台微小型仿蛇形机器人,该样机由一系列刚性连杆连接而成,可以在水平面内做一些简单的动作[57]。中国科学院沈阳自动化所是国内蛇形机器人研究比较多而且成果显著的单位之一,其研制的新型蛇形机器人 (图 27),能够实现蜿蜒运动、伸缩运动、侧向运动、翻滚运动,同时实现了水陆双栖功能[58]。另外通过利用神经元控制方法增强了机器人的自主避障能力[59]。此外,北京航空航天大学、哈尔滨工业大学、燕山大学等也进行了仿蛇形机器人的探索研究工作。——论文作者:王国彪 1 陈殿生 2 陈科位 2 张自强 2
* 稍后学术顾问联系您




