
输电线路除冰机器人的S形曲线加减速算法设计
分类:工程师职称论文
时间:2022-02-26
摘要:为提高输电线路除冰机器人的工作效率,达到节能的目的,提出了一种将 S 形曲线应用于机器人运动轨迹规划的方法。该方法充分利用了 S 形曲线的诸多优点,并对传统的复杂 S 形曲线算法进行了改进,采用 4 段加减速后退、 2 段加速前进的轨迹规划算法,同时还给出了相应的数学描述,最后通过仿真验证了该算法的实用性。
关键词:S 形曲线;除冰机器人;轨迹规划;加减速算法
0 引言
高压输电线路是电力供应的基本保障,但输电线路覆冰会严重影响电力系统的安全[1-3]。利用除冰机器人进行输电线路除冰是一种较为行之有效的除冰方式。国外对输电线路巡线机器人的研究起步较早[4],目前除冰机器人技术较为成熟的是加拿大魁北克水电研究院[5],研制了 HQ LineROVer 遥控小车,主要用于清除输电线路的覆冰,但该机器人不具备越障能力,只能清除两杆塔之间的覆冰。国 内在 863 计划的资助下,巡线机器人的研究取得了一定成果[6-8],但除冰机器人还处于研制阶段,没有成熟的产品。
除冰机器人的工作环境和内部结构特殊,应当选择合理的运动轨迹。传统工业控制中的加减速运行方式存在着加速度突变的问题,极易对机器人的传动系统造成冲击,严重的将造成设备故障[9]。采用性能良好的 S 形曲线加减速算法可有效避免上述问题的发生,并能得到较为理想的运行效果。目前很多学者针对 S 形曲线的算法设计和优化进行了研究分析[10-11],文献[12]建立了高速加工轨迹模型,并在 S 形曲线加减速控制模式下,提出一种基于时间最优的高速加工轨迹效率评价方案。利用 S 形曲线作为加减速算法在很多领域中都可以体现其优越之处,文献[13-15]将 S 形曲线加减速算法应用于数控系统中,取得了很好的控制效果,此外 S 形曲线作为加减速算法在机器人点位控制[16]、矿井提升机[17]和直线电机等系统[18]中也得到了应用。
本文将对除冰机器人在非覆冰导线上的后退和冲击轨迹进行分析,使机器人到达覆冰时冲击惯量最大,除冰效率最高。同时针对除冰机器人运行环境和工作方式的特殊性,为使除冰机器人运行平稳,本文将运用柔性的 S 形曲线加减速思想,有效减少冲击,延长机器人的使用寿命,使除冰机器人能在输电线路除冰中取得较好的运行效果。
1 除冰机器人的除冰原理
除冰机器人在输电线路上经历提速、平稳前进 2 个状态。除冰冰刀能够将覆冰有效除去;当遇到较厚的覆冰时,机器人速度下降,为避免驱动电动机堵转而造成故障,需执行停止命令,随即后退再冲击除冰。为达到理想的除冰效果,应使机器人再次到达覆冰位置时的冲击惯量最大,即再次到达覆冰位置时速度为最大值 vmax,且后退位移 S1 和前进位移 S2 相等;若后端线路仍遇减速情况,则反复执行本过程,以达到有效除冰的目的。机器人除冰过程理想速度曲线如图 1 所示。图中 vm为机器人的最大运行速度;vn 为机器人常规运行时的速度;vr 为后退时的反向最大速度;S1 为机器人后退位移;S2 为机器人前进位移,并且满足 S1+S2=0 的关系。
当除冰机器人遇到厚冰层时,执行停止指令,如图 2(a)所示;除冰机器人按给定的 S 形曲线加减速算法执行后退指令,如图 2(b)所示;当除冰机器人后退至指定位置后停止,如图 2(c)所示;除冰机器人按设计的 S 形曲线加速算法执行前进指令,如图 2(d)所示;当除冰机器人再次到达覆冰位置时速度达到最大值,并以最大速度冲击覆冰,如图 2(e) 所示。
2 除冰机器人运动轨迹规划算法设计
2.1 S 形曲线的后退运动轨迹规划
为保证除冰机器人在冲击除冰过程中能够平稳运行,需要对加速度进行控制。传统梯形加速方式的加速度变化不连续,会对机器人系统造成冲击,导致系统出现振动[9],而选择柔性度较好的 S 形曲线加减速控制可以避免此类情况的发生,从而提高机器人的工作效率。传统的 S 形曲线为 7 段函数,可实现加减速过程中加速度的连续变化[19-20],而传统的 7 段 S 形曲线算法参数较多,计算相对复杂,影响机器人的工作效率,因此本文对 S 形曲线进行了规划,采用 4 段 S 形曲线简便算法。数值取反后的 S 形曲线后退轨迹如图 3 所示,加速后退过程包含加速度增加和减少的加速段,减速后退过程包含加速度增加和减少的减速段,机器人向前运行的过程则只采用加速度增加和减少的加速过程,以保证机器人除冰过程能够稳定运行。图中 S 为位移; v 为速度;a 为加速度;j 为加速度变化率。
2.2 S 形曲线加减速后退算法
在机器人运行过程中,定义:a(t)为加速度;v(t) 为机器人的运行速度;S(t)为运动位移;运行过程中各阶段的终止时刻为 Tk=kT(k=1, 2, 3, 4)。采用迭代递推法可得:
1)在加速度增加的加速段,即 0≤t≤T1 时,有
3 仿真及结果分析
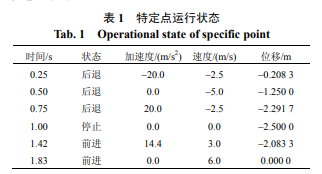
利用上述过程中的运行轨迹 S 形曲线加减速算法作为除冰机器人的期望运行轨迹,假定某输电线路除冰机器人所能达到的最大运行速度为 vmax= 6m/s;最大加速度为 amax=20m/s2 ;选取 T=0.25s。采用本文提出的 S 形曲线加减速轨迹规划控制算法时,由式(4)可得 jmax=80 m/s3 ;由 v6(T6)=vmax 和 S(T6)=0 可得 p=5/3、jf=34.56m/s3 。将上述参量代入除冰机器人运动轨迹规划算法中可得特定点运行状态,见表 1。
期望加速度、速度和位移轨迹如图 5 所示,可以得知:
1)在后退和前进过程中,机器人运行的加速度连续变化,并无加速度突变现象,从而使得机器人的运行适应驱动电动机的性能,有效减少冲击,避免机器人在运行过程中发生大幅度震动,从而可延长机器人的使用寿命。
2)除冰机器人的运行速度连续,速度变化平滑,且通过运行轨迹可以看出机器人的前进后退加减速算法具有良好的柔性,终止时刻达到最大速度值 vmax,使得除冰机器人再次到达覆冰位置时获得最大的冲击惯量,达到有效除冰的目的。
3)当除冰机器人沿冲击方向速度达到最大值 vmax 时,位移值为零,即机器人刚好到达后退起始位置。
4 结论
本文选用柔性的 S 形曲线对输电线路除冰机器人的运动轨迹进行了规划,并对传统 7 段 S 形曲线进行了改进,采用 4 段后退、2 段前进的 S 形曲线加减速算法,提高了机器人运行的平稳性,在实际应用中,只要根据实际情况适当地调整最大加速度、最大速度及运行时间,就能快速地得到性能优良的 S 形速度给定曲线。——论文作者:郝晓弘 1 ,胡振邦 1 ,朱洁 1 ,秦睿 2
参考文献
[1] 赵永生,王富荣,赵德奎,等.我国南方地区电网覆冰事故分析及应对措施研究[J].电力勘测设计,2009(1):52-56. Zhao Yongsheng,Wang Furong,Zhao Dekui,et al.Analysis and countermeasures about icing accident power transmission line in South China[J].Electric Power Survey & Design,2009 (1):52-56(in Chinese).
[2] 张宏志.大面积导线覆冰舞动事故的调查与分析[J].东北电力技术,2001,22(12):15-19. Zhang Hongzhi.Investigation and analysis on the accidents of large-area line conductors ice coating and galloping[J].Northeast Electric Power Technology,2001,22(12):15-19(in Chinese).
[3] 李政敏,庾振平,胡琰锋.输电线路覆冰的危害及防护[J].电磁避雷器,2006(2):12-14. Li Zhengmin,Yu Zhenping,Hu Yanfeng.Transmission line regulation harm and protection[J].Insulators and Surge Arresters,2006(2): 12-14(in Chinese).
[4] Jun Sawada.A mobile robot for inspection of power transmission lines[J].IEEE Transactions on Power Delivery,1991,6(1):309-315.
[5] Montambault S,Cote J,St-Louis M.Preliminary results on the development of a teleported compact trolley for live-line working [C]//Proceedings of the IEEE International Conference on Transmission and Distribution Construction and Live Line Maintenance.Montreal,Canada:IEEE,2000:21-27.
[6] 周风余,吴爱国,李贻斌,等.高压架空输电线路自动巡线机器人的研制[J].电力系统自动化,2004,28(23):89-91. Zhou Fengyu,Wu Aiguo,Li Yibin,et al.Development of a mobile robot for inspection of high voltage overhead power transmission lines[J].Automation of Electric Power Systems,2004,28(23): 89-91(in Chinese).
[7] 吴功平,肖晓晖,肖华,等.架空高压输电线路巡线机器人样机研制[J].电力系统自动化,2006,30(13):90-93. Wu Gongping,Xiao Xiaohui,Xiao Hua,et al.Development of a mobile inspection robot for high voltage power transmission line[J]. Automation of Electric Power Systems,2006,30(13):90-93(in Chinese).
[8] 朱兴龙,周骥平,王洪光,等.输电线巡检机器人越障机理与试验[J].机械工程学报,2009,45(2):119-125. Zhu Xinglong,Zhou Jiping,Wang Hongguang,et al.Experiments and mechanism of obstacle negotiation of an inspection robot for transmission lines[J].Journal of Mechanical Engineering,2009, 45(2):119-125(in Chinese).
[9] 朱晓春,屈波,孙来业,等.S 曲线加减速控制方法研究[J].中国制造业信息化,2006,35(23):38-40. Zhu Xiaochun , Qu Bo , Sun Laiye , et al . Study on the accelaration/decelaration control method for S-curve[J].Manufacture Information Engineering of China,2006,35(23):38-40(in Chinese).
[10] 李晓辉,邬义杰,冷洪滨.S 曲线加减速控制新方法的研究[J].组合机床与自动化加工技术,2007(10):50-53. Li Xiaohui,Wu Yijie,Leng Hongbin.Research on a new S-curve acceleration and deceleration control method[J].Modular Machine Tool & Automatic Manufacturing Technique,2007(10):50-53(in Chinese).
* 稍后学术顾问联系您




