
无人机航测技术及其在地形测绘工作中的应用探讨
分类:科技论文
时间:2020-06-08
【摘要】无人机航测技术融合了RTK测量GNSS等技术,因成本低、外业测量工作量小、精度高、成图速度快,近些年来大量应用在地形测绘工作当中。本文结合笔者多年的研究实践,引入实例探讨无人机航测技术及其在地形测绘工作中的应用,以供参考。
【关键词】无人机航测技术;地形测绘;实践应用
过去传统的测绘技术存在外业测量工作量大、成本高、流程繁琐及测量精度不高等技术缺陷,本文提出采用无人机航空摄影 测量技术,结合工程实例,根据无人机UAV航测系统原理,经无人机航空摄影和像片控制测量,采集基于Pix4D mapper航测数据处理系统收集的数据,并通过分析研究,为工程地形测绘提供决策依据。
1.无人机航空摄影测量技术分析
1.1技术原理
无人机航空摄影测量技术以UAV无人机航测系统为载体,集成了空中拍摄、无人机遥控遥测和视频影像传输处理等多种技术。无人机航测技术主要借助无人机、影像航拍设备、地面航线设计应用软件、无人机航摄飞行控制软件、地面信息处理系统、机载数据处理系统等,获取高分辨率及高精度遥感数字影像。通过无人机高空飞行作业,搭载数字航测设备进行工程地形遥感测绘,借助信息数据处理系统对无人机航空摄影所得相关遥感影像数据进行后期加工,从而制作形成符合各种比例尺精度要求及国家地形测绘标准的地图产品[1]。
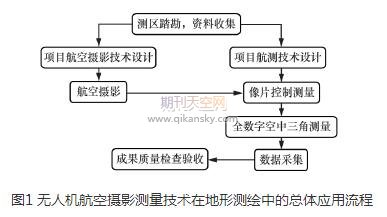
1.2工作流程
采用UAV无人机航测系统进行工程地形测绘时,需要经过无人机航空摄影,布设区域网像控点进行像片控制测量,全数字空中三角测量,相关数据采集及外业调绘及野外实测成果质量验收几个主要步骤流程,具体流程见图1。
2.地形测绘工程实例分析
2018年6月,受单位委托,某测绘工程有限公司承担我市西南位置1:2000现状地图的测绘任务,该测区位于地形类别为山地,平均海拔为700m,海拔最高处为850m,最低处为550m,测区实际面积为6.4km2,总体来看,该测区地形高低起伏大,崎岖不平,无法采用传统全野外测绘方法进行地形测绘,但测区工程总体平面视野开阔,适合航空摄影测量,故本工程决定采用无人机航测方案,高程系统和平面坐标系统采用1985国家高程基准和1980西安坐标系。
3.无人机航空摄影测量技术在地形测绘中的应用
3.1P700E型无人机航空摄影
在综合考虑当地气候条件及测区地形面积、夏季空域情况等因素基础上,本工程基于测量精度较高、续航时间较长的UX5-HP固定翼无人机进行航空摄影测量,同时借助镜头焦距为35 mm的Canon 5D Mark I数码相机,严格按照本测区任务要求,采用自带专业航线软件设计无人机航空摄影测量飞行计划[2]。本次测绘采用的无人机最大载重2.9 kg,测区无人机航飞最大速度为85 km/h,可持续续航约40 min。按照计划,本次测绘任务主要由4个架次的无人机进行飞行航测,相对航高为500 m,共设计飞行航线6条。在6.2km航飞面积内飞行约2.5 h,最终一共获取航空摄影图像365幅。经检查,365张航空影像的反差适中,色彩总体来看清晰且均匀,而且色调正常,能够满足无人机航空摄影及地形测绘技术实施要求。
3.2布设区域网像控点进行像片控制测量
结合无人及飞行架次设计情况和测区地形条件,基于区域网布设像控点,将全测区划分为若干网区,同时将平高控制点设置于2条及以上平行航线处,要求每对像控点实际像距应≤4条基线,且应在标准点位处分布。为提高像片控制测量及加密像控点精度,测绘时,将高程点和平高点分别增设于本测区区域网的的凹角处和凸角处。本工程测区内已建有四等GNSS控制网,为了确保加密控制点质量,本工程在像片控制测量过程中,基于HBCORS网络RTK联测,考虑到该测区平均海拔较高,地形条件复杂,对高程控制点也进行了平面坐标测量。
3.3基于Pix4D mapper 全数字系统空中三角测量
在本工程全数字空中三角测量过程中,主要采用无需人工进行干预的Pix4D mapper航测数据处理系统进行测量。Pix4D mapper系统是一种高精度、全自动以及快速的能够基于无人机航空摄影遥感影像内容,采用光束法区域网平差软件自动对原始影像进行真实定位和计算原始影像相关参数的区域网平差优化技术。在实施中,主要基于该系统的全数字化和自动化技术优势,分别经过内定向、相对定向和选取加密点、转点、构建区域网、连接模型、整理加密点成本等技术实施流程,获得真实的空中三角测量成果[3]。
3.4相关数据采集及外业调绘
在采集相关测绘数据资料时,本研究主要基于一种新型数字摄影测量系统———MapMatrix,直接利用空三加密成果按照所见即所得方式准确获取全数字空中三角测量结果,并基于该数字产品建立和恢复立体模型,全要素采集并制作DOM数字正射影像和DLG数字线划图。
3.5野外实测成果质量验收
在野外实测数据成果资料质量检查、验收过程中,首先需要按照一定比例要求,套合内业数据采集所获取的DOM数字正射影像图资料和数字线划图DLG,然后,将数字图纸打印为纸质测绘成果资料图,对照打印好的图纸,通过外业调绘,针对内业数据采集不可见或遗漏的相关地物、地貌等,然后对其实际地物属性信息进行注记,经依次经过改正屋檐和高程点补测等质量检查环节,最终基于CASS7.0软件编辑整饰成图。在检查核DLG图的质量精度时,本工程实际采用HBCORS网络RTK野外实测法,针对27.6% 的外业调绘成果图进行实地检测,其占野外巡视总比例的21.3%,有36幅,43幅经过实地检测,最终从图上选取53个明显地物点,主要包括“山顶”、“交叉道路点”、“房角”、“田坎交叉点”等几个不同类型。
针对图上采集的坐标和野外实测坐标进行一一对比分析,根据“高程精度”和“平面精度”两个方面的指标要求进行DLG图精度统计汇总。
结果显示:
(1)“田坎”地物类型平面精度的最大误差为0.297m,中误差为0.190 m; 而其高程精度的最大误差为0.403m,中误差为 0.37 m。
(2)“房角”地物类型的平面精度最大误差为0.376m,中误差为0.27 m; 而其高程精度的最大误差为0.572m,中误差为0.47 m。
(3)“道路”地物类型的平面精度最大误差为0.398m,中误差为0.29 m; 而其高程精度的最大误差为0.292m,中误差为0.27 m。
(4)“山顶”地物类型平面精度的最大误差为0.562m,中误差为0.48 m; 而其高程精度的最大误差为0.699m,中误差为0.66 m。
通过上述数据结果可知,检查地物点“田坎”、“房角”、“道路”及“山顶”四种地物类型平面位置最大误差分别为 0.297、0.572 、0.398、0.699 m,而按照我国现行基础地理信息数字成果相关技术实施要求,1∶2000 数字线划图( DLG) 地形图中山地、高山地地物点的平面位置中误差为0.8 m,而丘陵和平地处的中误差为0.6 m,另外山地、高山地、平地/丘陵四种地物类型地形图上地物点高程中误差允许值分别为1.5 m 和 0.7 m 所以经对比分析,本研究基于无人机UAV 航测系统所获取的案例工程地形测绘成果符合 ( CH/9008.1—2010) 现行相关技术要求,经地形测绘所得数字线划图( DLG) 成果经综合评定,结果均为“合 格”,为工程后期建设实施提供了参考依据[4]。
推荐阅读:无人机领域论文如何发表
4.结束语
综上所述,在传统地形测绘中,采用的测绘技术无法满足大比例地形图绘制需求,且只能在局部小范围内进行测图,相关测绘数据结果的更新则主要依赖于人工来完成。这种测绘工作方式不仅劳动强度大,而且作业效率低,无法满足当今地理信息产业化时代的工程地形测绘要求。本文在某案例工程地形测绘中,采用无人机航空摄影测量技术进行了测绘分析,最终取得符合要求的数字影像地形图,为工程建设提供了丰富的数字化、可视化成果。——论文作者:张小勇
* 稍后学术顾问联系您




