
背负式水果采摘机设计
分类:农业论文
时间:2018-07-21
摘要:针对我国当前水果园采摘作业需要劳动力多、采摘效率低、机械化采摘困难等问题,设计了一款操作简便、结构轻便且通用性强的背负式水果采摘机。该水果采摘机主要由执行结构(剪刀头)、传动机构(万向轴承、拉伸钢丝)、支撑机构(伸缩杆、背负式减负衣)、控制机构(切割控制手柄)、辅助机构(接果篮,缓速袖带)等构成。采摘时通过按动伸缩杆内嵌弹珠机构的小钢珠来调整支撑杆的长度,利用人体合理站位和转动万向轴承来调整剪刀头的位置,按动切割控制手柄使剪刀机构运动切断果柄,果实在自重的作用下掉入缓速袖带后减速滑落到集果袋中从而完成采摘作业。该采摘机结构简单、成本低廉、具有较强的通用性和可操作性,适用于大部分果园采摘,能顺利高效地采摘果实,极大地降低了劳动强度,提高了采摘效率。
关键词:采摘机;剪刀机构;接果篮;可伸缩杆;缓速袖带
我国不仅是水果生产大国,同时也是消费大国,果园种植业的发展对果园机械提出了更高的要求[1]。研究表明,在整个水果种植生产过程中,采摘果实所耗费的劳动力占耗费劳动力总体的35%~45%[2],并且采摘作业受季节性影响也很大。目前,我国农业劳动力普遍缺乏,生产成本不断提高,因此也降低了果农种植的积极性,制约了果园种植业的长远发展。为了节约人力物力,提高果农的经济收入,开发适用我国国情的水果采摘机械具有重要的意义。
当前对水果采摘的研究大多集中在机械式采摘、机电结合式采摘、机器人智能化采摘等方面[3]。我国南方果园大部分处于丘陵地带,工作环境相对复杂,目前采摘机的智能化水平还达不到农业生产的要求,加之电气元件对工作环境的要求较高,检修维护周期短,器件工作可靠度相对较低,机电结合式采摘机械很难完全发挥其作用。此外,我国的果园主要为分散栽培,分户管理的小规模生产种植,果农的技术素质偏低,大型机械式采摘器在此种种植形式下也不适用。为适应我国的实际种植情况,采摘设备需要简易高效、通用可靠、成本低廉,因此机械辅助的半自动采摘机成为目前采摘器的主要研究方向。
目前使用的半自动辅助机械式采摘器多为借助电气元件进行调控,使用电池供电[4]。采摘时对外界的环境伤害大,可靠性低,通用性差,检修维护周期短。为此,我们设计了一种新型的背负式水果采摘机。该机采摘时对外界环境伤害小,绿色清洁,携带轻便,工作省力可靠,通用性强,采摘效率高,适用于我国绝大多数果园的水果采摘。
1采摘机的总体结构与功能设计
1.1总体结构
背负式水果采摘机总体结构如图1所示。

背负马甲的外延平台固结万向轴承,伸缩杆可绕万向轴承实现外延平台上半球面上无死角旋转。电动机末端的剪刀机构在回位弹簧的作用下始终处于张开状态。接果篮下接缓速袖带并与背负马甲后的集果篮连接,缓速袖带上口大、下口小,中部设置若干缓速颈口。背负式减负装置主要由背负马甲构成,背负马甲下端由刚性较大的铝合金材料贴身制成。
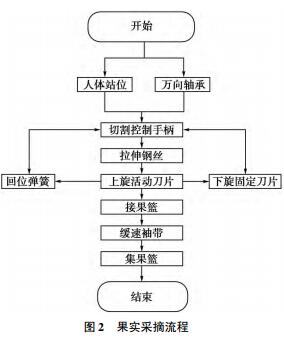
1.2工作原理背负式水果采摘机的采摘机械手由采果剪刀机构、接果篮和伸缩杆3部分组成。采果剪刀机构和接果篮机构依次安装在伸缩杆上,伸缩杆内嵌弹珠机构安装在第1节管的上部位置,控制绳索接在剪刀机构的滑块上,开始采摘前剪刀机构处于原始状态。采果机械手工作时将伸缩杆调到合适的高度,然后工作人员通过改变站位对准果柄,拉动与滑块相连的绳索,使活动剪刀片向固定剪刀片合拢,实现剪刀剪切动作,剪下的果实落入接果篮中,在重力的作用下果实进入缓速袖带,通过缓速袖带的减速作用使果实平稳地落在背负马甲后的集果篮中,然后在回位弹簧的作用下使活动剪刀片复位。由于采摘果实是直接剪断果实的果柄并不与果实表面接触而挤压果实,所以特别适合采摘软质果实或无外果皮包裹的果实。
1.3采摘流程果实采摘流程如图2所示。
2主要部件设计
2.1采摘剪刀设计
采摘剪刀机构由固定剪刀片、活动剪刀片、连杆和滑块等构件组成一个曲柄滑块机构,附加回位弹簧起到剪刀复位的作用。机构中的活动剪刀片和固定剪刀片与固定板铰接,固定板上开有滑块滑动的槽口,通过拉动与滑块连接的蝇索使活动剪刀片绕铰链支点转动,使活动剪刀片向固定剪刀片合拢,完成剪切果柄或剪断挂果果枝的动作。采摘剪刀结构如图3所示。

2.2接果篮机构设计
采摘剪刀正下方是接果篮机构,设计的接果篮应质量轻、强度高,对水果没有碰撞损伤,便于拆卸更换。基于上述考虑,将接果篮设计为下底圆直径100mm、上顶圆直径150mm、高为80mm的圆台型,最大承载质量5kg,材料选用亚克力板,上圆开口,中间镂空,底部开口与缓速袖带连接。接果篮结构如图4所示。

2.3可伸缩杆机构设计
可伸缩杆需承受水果的质量及其下落的冲击力,因此其应具有较高的强度、刚度和硬度,同时还要要求其质量轻。支撑杆的材料选用质量轻且强度高的中空铝合金管材,外径29mm、内径25mm、上伸缩杆长1500mm,下伸缩杆长度为500mm,最大采摘高度≥4m,上下伸缩杆成直线状态,通过弹珠机构锁定位置。可伸缩杆结构如图5所示。

2.4伸缩杆弹珠机构设计
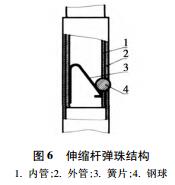
伸缩杆共设置2节可动伸缩,携带时缩为1节,便于携带,现场采摘时可根据果实枝条所在的高度,按动钢球将第2节杆伸出,用以调节剪刀的工作高度。伸缩杆的弹出采用弹珠机构,利用簧片的弹力卡住钢球在外管管内移动,当钢球接触到外管上的定位孔时钢球即嵌入到该孔内,内管不能再伸出,内管定位固定。伸缩杆弹珠结构如图6所示。
2.5缓速袖带机构设计
缓速袖带上袖口连接接果篮,下袖口连接集果篮,用于将剪断果柄的果实缓速平稳地收集到集果篮中,要求果实既不能卡在袖口内,也不能缓速效果不明显,果实不能因与缓速袖口内壁碰撞和摩擦而产生破损。缓速袖带要柔性好,轻巧易展开,不易弯曲盘结。
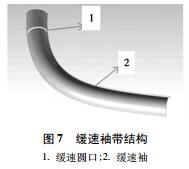
基于上述考虑,将缓速袖口设计为上袖口圆直径100mm,下袖口圆直径80mm,最大长度2.5m的形状,材料采用轻便廉价的尼龙缝制。内壁设置3个缓速圆口,缓速圆口由松紧带构成,圆口直径依次分别设置为170mm、150mm、120mm,圆口在缓速袖口内的位置如图7所示。使用时可根据采摘果实的高度将缓速袖口中部堆叠(非向内设置缓速圆口部分),并用长尾夹夹紧堆叠部分使其缩短,以保证下袖口悬空正对集果篮。缓速袖带结构如图7所示。
2.6背负式减负装置
设计背负式减负装置由弹力衣、工作架和球铰链构成。工作架由20cm×20cm的两块相互垂直的铝合金板构成,置于弹力衣腰部,由布带和金属线固定在弹力衣上,球铰链固定于工作架上。当操作者使用采摘剪时,可将球铰链的一端插入采摘剪末端的套筒中,将采摘剪固定在工作架上,让身体承受工作时的大部分力,手臂只负责控制采摘剪的运动。背负式减负装置结构如图8所示。

3采摘剪刀机构运动学和受力分析
3.1运动学分析采摘剪刀机构运动学分析如图9所示。
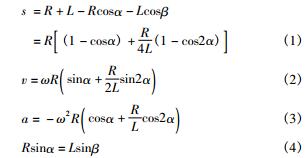
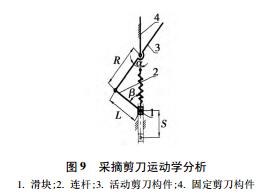
剪刀机构为曲柄滑块机构,其中滑块是主动件,由人手拉动绳索使滑块向下移动,滑块的速度和加速度影响可以忽略不计。由上述公式可知,参数R、L决定了剪刀机构的结构尺寸,S决定了滑块的槽口长度尺寸,α或β角决定了剪刀的张口大小和剪刀口的剪力大小。
剪刀的初始位置是剪刀口的最大张口位置,而滑块的最大位移,即杆2与杆3在一直线上时,剪刀口合拢,剪刀剪断果柄或挂果果枝时的位移。
在该机构中,用手向下拉动固定在滑块上的绳索时,剪刀运动为工作行程,当拉动滑块使活动剪刀片与连杆成一直线时,滑块行程S为最大值,此时也是滑块上移的死点位置,滑块的反行程驱动则改由弹簧力作用,同时放松手拉绳索。
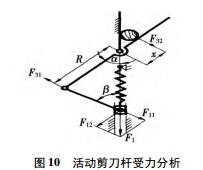
3.2受力分析
活动剪刀杆受力分析如图10所示,设手拉绳索的力为F1,其作用在滑块上可分解为F11和F12两个力,F11的大小可表示为:F11=F1cosβ;F12=F1sinβ(5)式中:F1为手拉绳索的力,其是驱动滑块向下移动的力,也是活动剪刀复位弹簧的弹簧拉力。F32的大小可表示为:

式中:F32为剪刀剪切果柄或挂果果枝的剪力;R为活动剪刀端部铰链点距固定铰链点距离;x为果柄接触活动剪刀接触点距固定铰链点的距离。
4结束语
试验表明,背负式水果采摘机结构简单、成本低廉、可靠性高、有较强的通用性和可操作性,而且机构运动分析和参数计算容易。使用该机采摘水果时无需动力,手工操作,绿色环保,可广泛应用于高枝果实的采摘,其与传统的人字梯或上树的采摘方式相比更安全,而且可降低劳动强度,提高采摘效率和经济效益。
参考文献:
[1]宋健.茄子采摘机器人结构参数的优化设计与仿真[J].机械设计与制造,2008,46(6):166-168.
[2]SANDERSKF.Orangeharvestingsystemsreview[J].BiosystemsEngineering,2005,90(2):115-125.
[3]段洁利,陆华忠,王慰祖,等.水果采收机械的现状与发展[J].广东农业科学,2012,39(16):189-192.
[4]何家成,段文婷,李凤佳,等.手持式电动水果采摘机设计[J].安徽农业科学,2013,41(25):10557-10559
* 稍后学术顾问联系您




